ربات مسیریاب
این ربات، فقط یک ربات مسیریاب نیست و قابلیت کنترل با گوشی و همچنین حرکت در محیط و عدم برخورد با مانع با استفاده از ماژول آلتراسونیک را هم داره.
در این مطلب می خواهم که اطلاعات مربوط به ساخت رباتی که ویدئوی آن را قرار دادم برایتان منتشر کنم.
1– مدار و شماتیک
لیست قطعات:
AMS1117 – ,MC34063 – LM324 – ATXMEGA32A4U – SRF05 – ESP8266 – L293
1-1 : واحد تغذیه: برای مدار نیاز به ولتاژ 3.3 ولت و 5 میباشد. رگولاتور 3.3 ولت AMS1117 تغذیه میکرو و ماژول WIFI را تامین میکند. رگولاتور MC34063 نیز ولتاژ 5 ولت سایر قطعات را تامین میکند. که به دلیل کوچک بودن سایز این رگولاتور و سلفش انتخاب شده است.

1-2: پردازنده: برای این مورد هم از پردازنده محبوبم یعنی ATXMEGA32A4U استفاده کردم.

1-3: ESP8266: ارزان ترین و در دسترس ترین و کوچکترین و محبوب ترین ماژول وای فای موجود در دنیا میباشند.

1-4: SRF05: ماژول فاصله سنج آلتراسونیک با حداکثر اندازه گیری 5 متر
1-5: LM324: خروجی آنالوگ سنسورهای مادون قرمز TCRT5000 با استفاده از حالت مقایسگر آپ امپ تبدیل به دیجیتال شده و به میکرو منتقل میشود. از سه سنسور برای حالت مسیریاب استفاده شده است. و سنسور چهارمی هم پیش بینی شده که بتوان کنار چرخ نصب کرد و تعداد چرخیدن چرخ را شمرد که فعلا از آن استفاده نشده است.

1-6: L293 : راه اندازی موتورها به عهده درایور L293D میباشد. که امکان کنترل دو موتور را به صورت چپ-گرد / راست-گرد با جریان خروجی برای هر موتور 600 میلی آمپر را دارد.


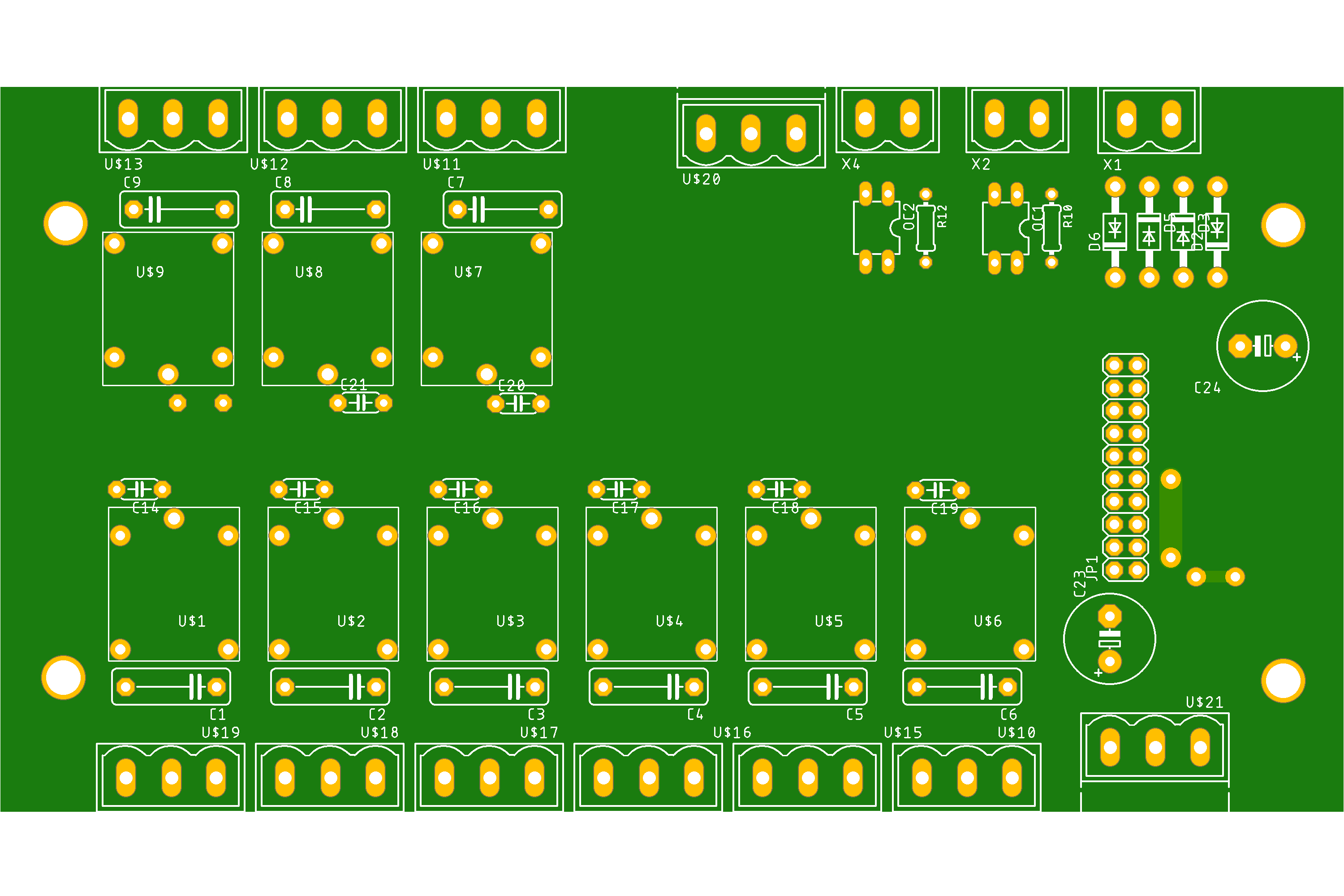
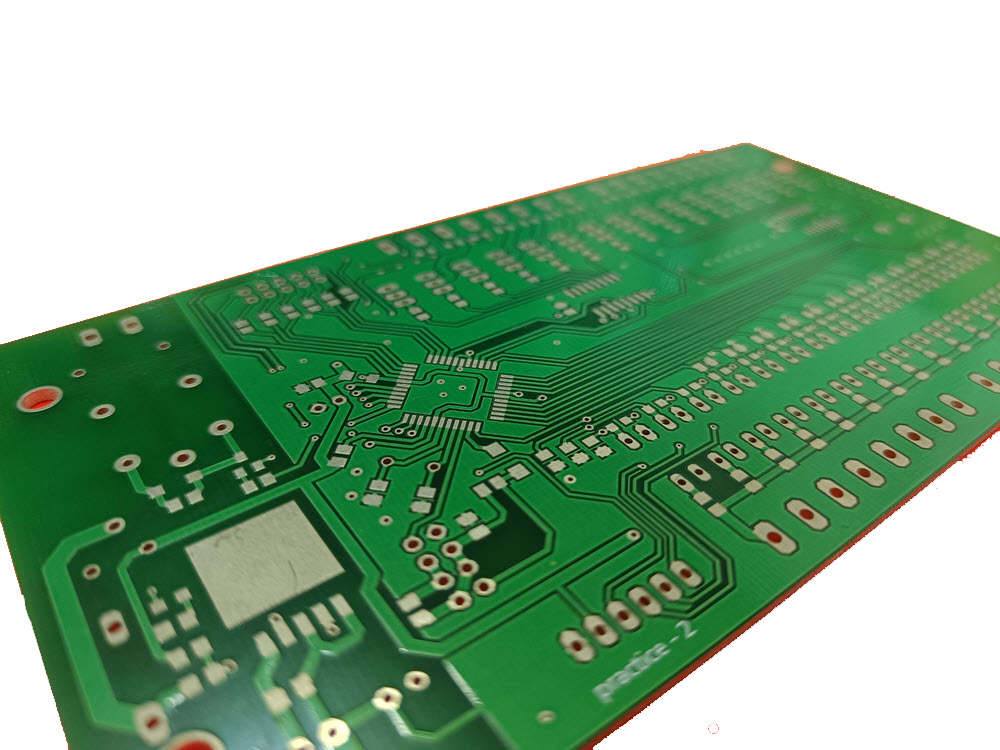
2- PCB:
برد ربات با استفاده از نرم افزار EAGLE و به صورت یک رو طراحی شده است. آموزش های این نرم افزار را از اینجا میتوانید دانلود کنید.

3-توضیحات برنامه:
برنامه به زبان C و نرم افزار اتمل استودیو نوشته شده است.
با فرض بر اینکه دوستان با برنامه نویسی زبان C آشنا هستند، قسمتهایی که بیشتر مربوط به تنظیمات سخت افزاری ATXMEGA میباشد را شرح میدهم.
3-1: در ابتدای برنامه تابع init فراخوانی شده و فرکانس میکروکنترلر با اجرای تابع osc_extclk_pll_init از کتابخانه osilator config.h در حالت اسیلاتور متصل به کریستال خارجی تنظیم میشود و با استفاده از واحدد PLL فرکانس 8 مگاهرتز ضربدر 4 شده و به 32 مگاهرتز میرسد و با توجه به این که ضرایب Prescaler A و Prescaler B و Prescaler C بدون تغییر با مقدار پیش فرض 1 میباشند فرکانس کاری CPU هم 32 مگاهرتز خواهد بود.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 |
void osc_extclk_pll_init(void) { OSC.XOSCCTRL = OSC_FRQRANGE_12TO16_gc | OSC_XOSCSEL_XTAL_16KCLK_gc; OSC.CTRL |= OSC_XOSCEN_bm; // enable External Oscillator while(!(OSC.STATUS & OSC_XOSCRDY_bm)); // wait for oscillator to be ready OSC.PLLCTRL = OSC_PLLSRC_XOSC_gc | 4; OSC.CTRL |= OSC_PLLEN_bm; while(!(OSC.STATUS & OSC_PLLRDY_bm)); // wait for oscillator to be ready CCP = CCP_IOREG_gc; // disable register security for clock update CLK.CTRL = CLK_SCLKSEL_PLL_gc; // switch to PLL clock } |
3-2: کنترل دور موتور:
برای کنترل دور موتورها تایمر/کانتر 1 از پورت C در حالت Single-slop PWM Generation قرار داده شده و فرکانس خروجی PWM با قرار دادن مقدار 800 در رجیستر پریود تایمر بر روی 156 هرتز تنظیم شده ، خروجی PWM بر روی پایه های OC1A و OC1B فعال و تایمر با Prescaler 256 شروع به کار کرده است.
|
1 2 3 4 5 6 |
TCC1.CNT = 0; TCC1.PER = 800; //FOR FRQ PWM TCC1.CTRLB = TC_TC1_WGMODE_SINGLESLOPE_gc | TC1_CCAEN_bm | TC1_CCBEN_bm; TCC1.CTRLA = TC_TC1_CLKSEL_DIV256_gc; //START TIMER WITH PS256 EN_L = motor.l_min; //SET DIUTY CYCLE OC1A EN_R = motor.r_min; //SET DIUTY CYCLE OC1B |
3-3: اندازه گیری فاصله با استفاده از ماژول SRF05:
به صورت خلاصه با تحریک کردن پایه Trigger و اندازه گیری مدت زمان تغییر وضعیت پایه echo می توان فاصله تا مانع را بدست آورد. با تحریک پایه تریگر؛ پایه اکو به وضعیت یک تغییر میکند و بعد از دریافت برگشت امواج فراصوت وضعیت پایه به صفر برمیگردد.
با توجه به اینکه اندازه گیری فاصله با مانع؛ برای جلوگیری از برخورد با مانع؛ باید پشت سر هم تکرار شود در صورتی که اندازه گیری طول پالس را CPU انجام دهد باعث مشغول شدن CPU و کاهش استفاده مفید از آن میشود. به این خاطر اندازه گیری طول پالس به قابلیت Pulse Width Capture از تایمر صفر پورت C واگذار میشود. برای این کار باید وقفه بر روی پایه میکرو که به خروجی اکو ماژول متصل است در حالت both edges فعال شود و از طریق Event به عنوان ورودی واحد کپچر تایمر متصل شود.
نحوه کار تایمر در حالت اندازه گیری عرض پالس به این شکل است که با لبه بالا رونده پالس، تایمر ریست شده و از مقدار صفر شروع به شمارش میکند و با لبه پایین رونده پالس، مقداری که در شمارنده تایمر قرار دارد در رجیستر کپچر(CCX) ذخیره میشود.
در اینجا کانال صفر ایونت به PIN2 از PORTA متصل و وقفه خارجی پایه در حالت both edges به عنوان تریگر ایونت انتخاب میشود.
|
1 2 3 |
EVSYS.CH0MUX = EVSYS_CHMUX_PORTA_PIN2_gc; //ENABLE EVENT CHANEL 0 ON PIN2 FROM PORTA PORTA.PIN2CTRL = PORT_ISC_BOTHEDGES_gc;//ENABLE Sense both edges ON PORTA2 FOR TRIGER EVENT CHANEL 0 |
تنظیم تایمر در حالت کپچر:
|
1 2 3 4 5 6 7 |
TCC0.CNT = 0; TCC0.CTRLB = TC_TC0_WGMODE_NORMAL_gc | TC0_CCAEN_bm;//ENABLE CAPTURE CHANEL A(CCA)- TIMER IN NORMAL MODE TCC0.CTRLD = TC_TC0_EVACT_PW_gc | TC_TC0_EVSEL_CH0_gc;//ENABLE TIMER EVENT FOR Pulse width capture - CHANEL 0 EVENT TCC0.INTCTRLB = TC_TC0_CCAINTLVL_LO_gc; //ENABLE LO LEVEL INTERRUPT FOR CAPTURE CHANEL A TCC0.CTRLA = TC_TC0_CLKSEL_DIV64_gc; //START TIMER WITH PS64 |
3-4:مدیریت مصرف: با توجه به اینکه تغذیه ربات از باتری تامین میشود بنابراین باید مصرف جریان را به حداقل برسانیم به این منظور از طریق رجیستر کنترلی Power Reduction کلاک قسمتهای سخت افزاری میکرو که استفاده نمیشوند را قطع میکنیم.
|
1 2 3 4 5 |
PR.PRGEN = PR_USB_bm | PR_AES_bm | PR_RTC_bm | PR_DMA_bm; PR.PRPA = PR_AC_bm | PR_ADC_bm | PR_DAC_bm; PR.PRPB = PR_AC_bm | PR_ADC_bm | PR_DAC_bm; PR.PRPC = PR_TWI_bm | PR_USART1_bm | PR_USART0_bm | PR_SPI_bm; PR.PRPD = PR_TWI_bm | PR_USART1_bm | PR_USART0_bm | PR_SPI_bm; |